Gazebo Plugin_Battery
Gazebo Plugin 에 대한 기본적인 개념은 이전 페이지에서 언급했다. 참고 : https://eeoon.github.io/robotics/Gazebo_Plugin-content/
배터리 시스템을 Gazebo Plugin을 통해서 Custom 하는 간단한 예시를 진행하면서 Gazebo Plugin에 대해서 조금 더 깊게 알아보자.
배터리 시스템
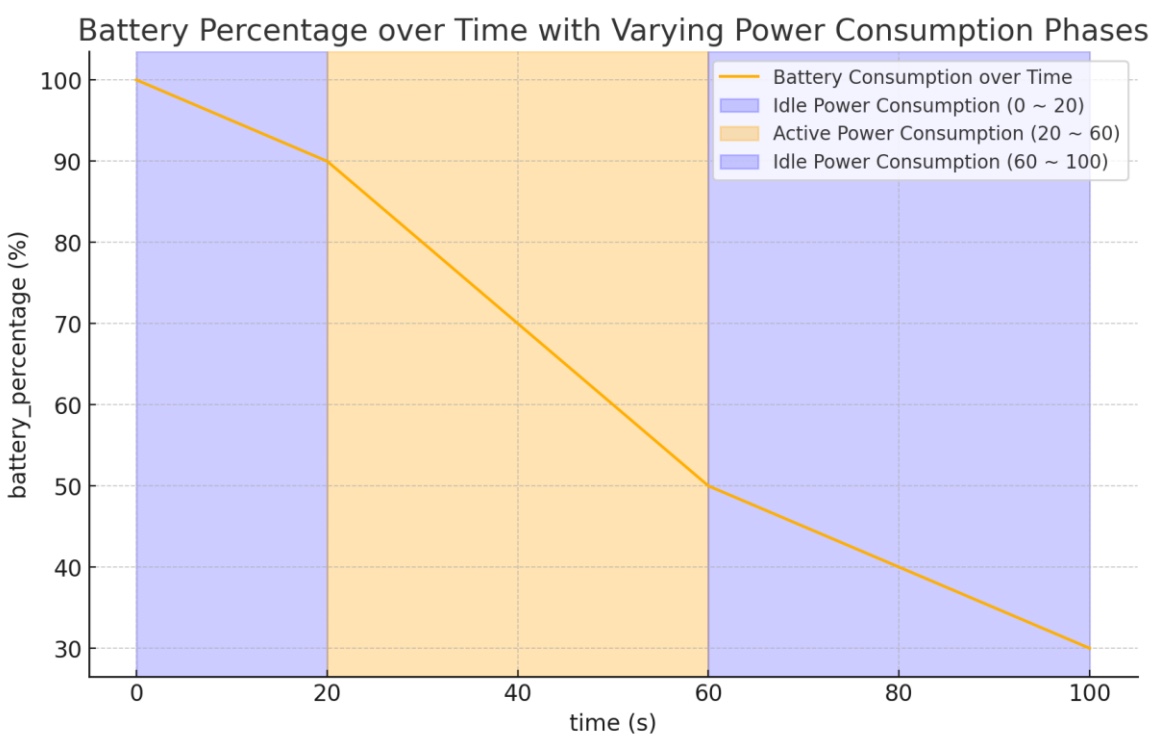
- 배터리 시스템은 다양하게 구현될 수 있겠지만 기본적으로 대기전력, 소비전력만 고려하여 구현한다. (사실은 BMS(Battery Management System)에서는 비선형으로 전력소모를 고려하겠지만..)
- 대기전력 시스템을 고려하여 로봇이 움직이지 않더라도 배터리 소모가 어느정도 선형적으로 발생하는 것을 기본으로 로봇이 움직이는 경우에는 모터 드라이버의 전력 소모까지 고려하여 조금 더 큰 폭으로 배터리 소모가 진행될 수 있도록 하였다.
Gazebo Plugin (Custom)
- Gazebo Plugin을 커스텀하기 위해서는 다음과 같이 진행한다.
Workspace에서 source file을 생성하고 Gazebo에 대한 해더파일을 참고할 수 있도록 한다.
#include <gazebo/common/Plugin.hh> #include <rclcpp/rclcpp.hpp> #include <std_msgs/msg/float32.hpp> #include <std_msgs/msg/string.hpp> #include <gazebo_ros/node.hpp> #include <gazebo/physics/Model.hh> #include <gazebo/physics/World.hh> #include <gazebo/physics/Link.hh> #include <gazebo/physics/Joint.hh> #include <geometry_msgs/msg/twist.hpp> #include <gazebo/common/common.hh> #include <gazebo/common/Exception.hh> #include <gazebo/transport/transport.hh> // 이외 필요한 해더파일을 추가한다.SDF 파일에서 parameter를 설정할 수 있도록 하기 위해서 다음과 같이 설정한다.
// Read parameters from SDF if (_sdf->HasElement("topic_name")) topic_name_ = _sdf->Get<std::string>("topic_name"); else topic_name_ = "battery_status"; // default value배터리 정보의 토픽을 publish 하기 위한 부분 설정한다.
battery_pub_ = node_->create_publisher<sensor_msgs::msg::BatteryState>(topic_name_, 10);배터리 상태를 업데이트하는 callback 함수를 생성해서 구현한다.
battery_charge_ -= scale_ * power_consumption * dt / 3600.0; // Convert power (W) to energy (Ah) voltage_ = (battery_charge_ / capacity_) * constant_voltage_; double battery_percentage = (battery_charge_ / capacity_) * 100.0;CMakeLists.txt 파일에서 Class 를 library에 추가하고 이외의 설정을 진행한다.
cmake_minimum_required(VERSION 3.5) project(gazebo_battery_plugin) find_package(gazebo_ros REQUIRED) # ... 이외의 find_package 설정 # ... ex, find_package(rclcpp REQUIRED) # include directories( include ${GAZEBO_INCLUDE_DIRS} ${rclcpp_INCLUDE_DIRS} # ... 이외의 include 설정 # Build the plugin add_library(BatteryPlugin SHARED src/BatteryPlugin.cc) ament_target_dependencies(BatteryPlugin rclcpp std_msgs gazebo_ros geometry_msgs gazebo_dev sensor_msgs) target_link_libraries(BatteryPlugin ${GAZEBO_LIBRARIES}) # install install(TARGETS BatteryPlugin LIBRARY DESTINATION lib ) #ament_package()build 폴더를 생성하고 cmake를 진행해서 build 파일에 plugin에 대한 lib를 생성한다
cd buildcmake ..make생성된 lib를 Gazebo 에서 plugin 할수 있도록 build 폴더를 참조할 수 있도록 한다.
export GAZEBO_PLUGIN_PATH=$HOME/gazebo_battery_plugin/build:$GAZEBO_PLUGIN_PATH해당 plugin을 사용하기 위해서 이전에 다른 센서들의 plugin을 추가한 것 처럼 SDF 파일에서 설정한다.
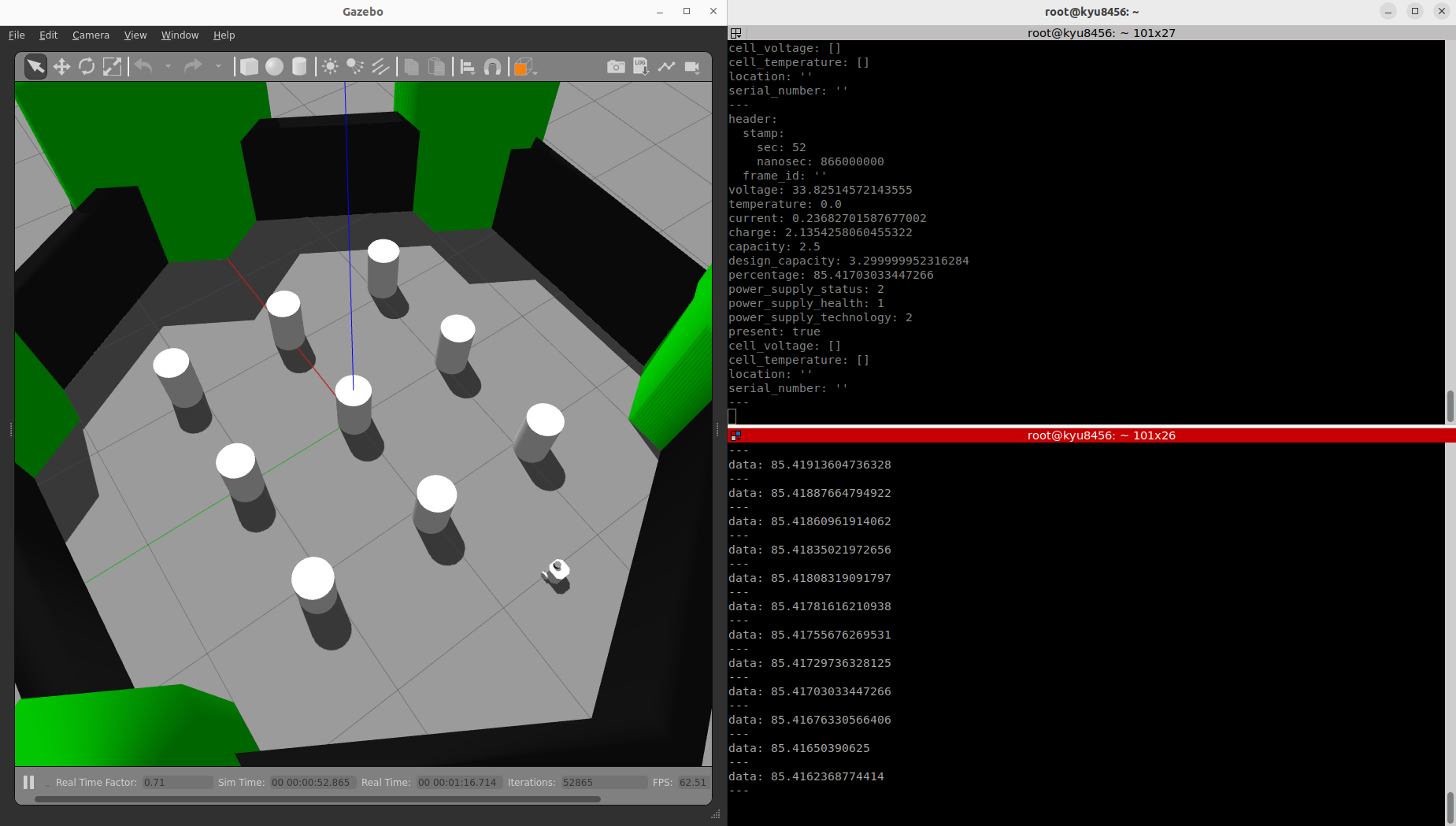
<!-- *********************** Battery STATE *************************** --> <plugin name="BatteryPlugin" filename="libBatteryPlugin.so"> <topic_name>battery_state</topic_name> <battery_charge>2.5</battery_charge> <scale>100.0</scale> <capacity>2.5</capacity> <voltage>39.6</voltage> <constant_voltage>39.6</constant_voltage> <lin_discharge_coeff>-1.0</lin_discharge_coeff> <design_capacity>3.3</design_capacity> </plugin>토픽 데이터 확인
- topic : battery_state / battery_percentage
- battery_state 에서는 전압, 전류 등 sensor_msg 에 해당하는 데이터를 , battery_percentage는 battery_state 중, 배터리 잔량 표시를 출력한다.
참고 링크 : https://classic.gazebosim.org/tutorials?cat=guided_i&tut=guided_i5