Gazebo
Gazebo Simulator
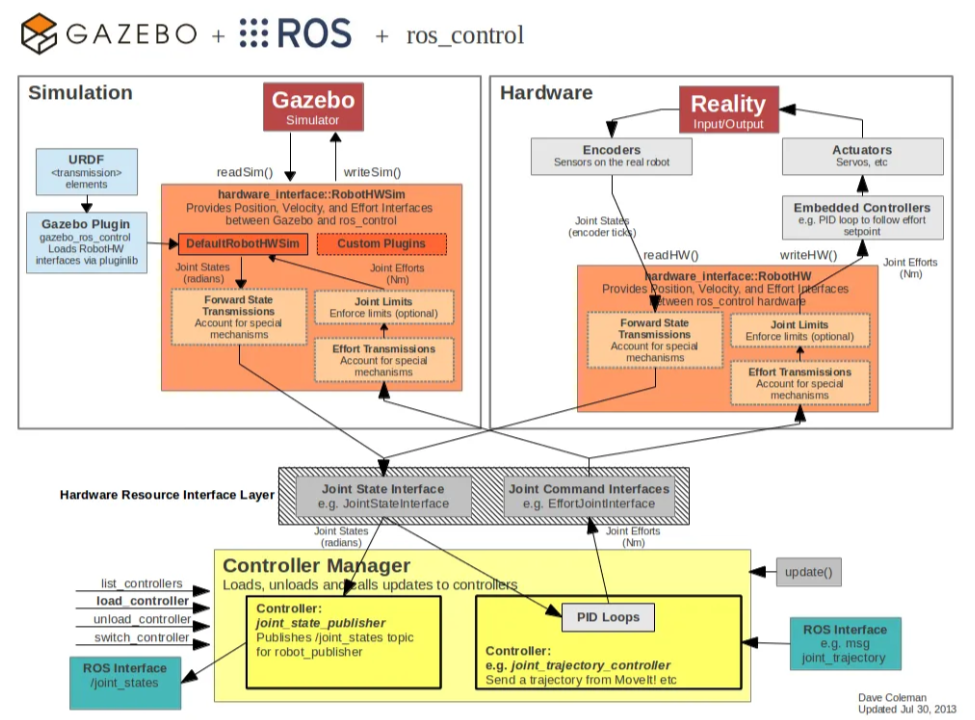
Gazebo_BlockDiagram
출처 : https://classic.gazebosim.org/tutorials
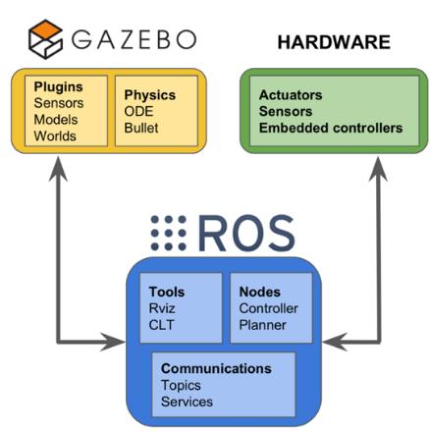
위조금 더 간략하게 그림을 그리자면 아래와 같다.
What is Gazebo?

- Gazebo는 Robotics Simulator의 한 종류로 오픈소스 3D Simulator.
- Robot의 motion을 simulation하고 visualize 하는데 사용된다.
- Gazebo는 ROS와 통합되어 있어 ROS를 사용하는 대다수, 대부분의 프로젝트에서 사용되며 하나의 시뮬레이터 소프트웨어 프레임워크로 발전해 왔다.
- Gazebo의 장점으로 다양한 유형의 Robot, Sensor, Environment를 지원하며 사용자는 자신만의 로봇을 만들수도, 환경을 설정할 수도 있다. 또한 시뮬레이션 중 Robot을 Control하고 Sensing 할 수 있어 많은 데이터를 얻을 수 있다.
- 다양한 환경 구성 중 조명, 햇빛, 그림자, 텍스처, 수중환경, 등 현실적인 환경 렌더링을 제공한다.
- 2017년 Gazebo Classic과 함께 Ignition이 등장하였다. (자주 사용해보지는 않았으나 프레임워크가 조금 더 가볍다는 장점이 있는 것 같다.)
- Gazebo Classic 에서는 ODE 물리 엔진, OpenGL 렌더링, 그리고 Sensor Simulation, Actuator Control을 위한 지원 코드를 통합하며 고성능 물리 엔진을 사용할 수 있도록 함
)](https://raw.githubusercontent.com/eeoon/eeoon.github.io/main/robotics/images/gazebo/image4.png)
참고 사진 : aws_warehouse (https://github.com/aws-robotics/aws-robomaker-small-warehouse-world)
Gazebo환경을 구성하는 것을 파악해보자
Gazebo 환경을 구성하는 것은 크게 환경(World)와 그 안에 존재하는 로봇, 센서 등 Model(sdf,urdf,xacro) 가 존재한다.
](https://raw.githubusercontent.com/eeoon/eeoon.github.io/main/robotics/images/gazebo/image5.ppm)
World
world 파일을 보면 기본적으로 XML 형식으로 작성되며 로봇 및 다양한 객체의 위치, 모양, 센서, 광원, 물리적 특성 등을 포함하여 시뮬레이션 환경을 설명한다.
- Model : 환경에 있는 로봇, 센서 등을 설명하는데 사용 각 모델 위치, 회전, 링크 조인트 등으로 정의
- Physics Properties : 시뮬레이션에서 물리적 특성으로 중력, 마찰, 충돌 등 포함할 수 있다.
- Lights : 시각적으로 현실적인 환경을 만들기 위해 다양한 종류의 조명이 있으며 위치, 유형, 강도 등 설정할 수 있다.
- Ground : 시뮬레이션에서 floor를 설명한다. 지형, 텍스처, 색상 등 정의 할 수 있다.
Fluids : 시뮬레이션 환경에서 수중환경이 필요하다면 설정할 수 있다.
.world 파일의 예시를 보자 (example.world,주석으로 해당부분 간략히 설명)
<?xml version="1.0"?> <sdf version="1.6"> <world name="example"> <!-- ground를 설정 --> <include> <uri>model://ground_plane</uri> </include> <!-- 조명으로 sun을 이용 --> <include> <uri>model://sun</uri> </include> <!-- 그림자 사용 여부 --> <scene> <shadows>false</shadows> </scene> <!-- 전체화면 설정 및 실행하였을 때 사용자가 바라보는 시점 --> <gui fullscreen='0'> <camera name='user_camera'> <pose frame=''>0.319654 -0.235002 9.29441 0 1.5138 0.009599</pose> <view_controller>orbit</view_controller> <projection_type>perspective</projection_type> </camera> </gui> <!-- ODE 물리 엔진에 대한 설정 --> <physics type="ode"> <real_time_update_rate>1000.0</real_time_update_rate> <max_step_size>0.001</max_step_size> <real_time_factor>1</real_time_factor> <ode> <solver> <type>quick</type> <iters>150</iters> <precon_iters>0</precon_iters> <sor>1.400000</sor> <use_dynamic_moi_rescaling>1</use_dynamic_moi_rescaling> </solver> <constraints> <cfm>0.00001</cfm> <erp>0.2</erp> <contact_max_correcting_vel>2000.000000</contact_max_correcting_vel> <contact_surface_layer>0.01000</contact_surface_layer> </constraints> </ode> </physics> <!-- 추가적인 구조물 or 로봇 등 언급 가능 (option) --> <!-- link 구조에 visual(시각화), Collision(충돌)에 대한 설정 --> <link name="wall"> <visual name="wall"> <geometry> <mesh> <uri>model://{world_repository}/meshes/wall.obj</uri> </mesh> </geometry> <transparency>0.0</transparency> <material> <diffuse>1.0 1.0 1.0</diffuse> <specular>0.1 0.1 0.1</specular> <pbr> <metal> <metalness>0.0</metalness> <albedo_map>model://{world_repository}/meshes/white_brick.png</albedo_map> </metal> </pbr> <script> <uri>model://{world_repository}/meshes/</uri> <name>wall_Diffuse</name> </script> </material> </visual> <collision name="collision"> <geometry> <mesh> <uri>model://{world_repository}/meshes/wall.obj</uri> </mesh> </geometry> <surface> <contact> <collide_bitmask>0x01</collide_bitmask> </contact> </surface> </collision> <pose>-9.817441860465117 -12.710465116279071 0 0 0 0</pose> </link> </world> </sdf>
Model
로봇, 센서 들을 정의하는 파일 형식은 SDF(Simulation Description Format), URDF(Unified Robot Description Format), Xacro 이 있다. 각각의 특징과 차이점을 파악해보자
- SDF :
- Gazebo Simulator를 위한 파일 형식으로 로봇, 센서, 환경 등 시뮬레이션 요소를 정의한다.
- XML 형식으로 작성, 모델의 물리적 특성, 센서의 속성, 환경의 텍스처 등 정의한다.
- URDF :
- URDF는 로봇의 기하학적 및 시각적 특성을 설명한다.
- XML 형식으로 작성, 로봇의 기하학적 형상인 로봇의 링크, 조인트를 정의하여 로봇의 구조를 설명한다.
- 로봇 모델링 및 시각화 도구에 사용, 주로 ROS를 위한 파일 형식이다.
- Xacro :
- URDF의 확장으로 XML 기반으로 작성된 URDF 파일을 더 효율적으로 작성할 수 있다. 마찬가지로 ROS를 위한 파일 형식이다.
- 매개변수화와 매크로 기능을 제공하여 조금 더 쉽게 코드를 재사용하고 가독성을 향상시킨다.
- URDF 파일보다 조금 더 간결하고 유지 관리가 쉽다.
전체적인 차이는 SDF는 Gazebo Simulation을 위한 것, URDF는 로봇의 기하학적 구조를 정의하므로 로봇의 모델링과 시각화에서 ROS와 호환, Xacro는 조금 더 쉽게 URDF를 작성하는 URDF의 확장 구조이다.
다음 포스트에서 Model 파일의 구조와 Gazebo Plug-in에 대해서 알아보자.
참고 : Gazebo : Tutorials