Computer Vision
Computer Vision, Autonomous Driving, Image processing
Vanishing Point & Perspective Transform
Vanishing Point & Perspective Transform
영상처리를 통한 자율주행
project propose : Vanishing point를 활용하여 주행 방향을 결정할 때 발생되는 오차를 Lane detection을 통해 보안
- 영상 처리 과정에서 라인을 검출하여 만나는 지점의 소실점(Vanishing Point)를 활용하여 주행방향(조향)을 결정한다.
- 소실점이 생성되는 과정에서 발생되는 오차는 박스를 설정하여 소실점이 박스를 벗어났는지 판단하는 과정을 진행한다.
- 카메라가 인식하는 2차원을 Perspective Transform의 과정을 거쳐 라인을 검출하였다.
- 카메라를 통해 검출된 소실점과 라인 검출을 통해 새로운 해석을 도입한다.
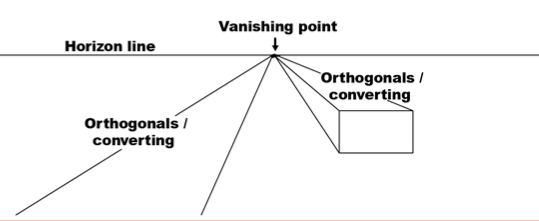
Vanishing Point
3D 공간에서 평행한 직선은 2D 영상에서 FOV(Field of View)로 인하여 평행하게 보이지 않는다. 간단한 예시로 도로위의 차선은 bird of view로 바라보면 평행하나 운전자의 입장(카메라)에서 바라보면 평행하지 않게 된다.
basic of concept

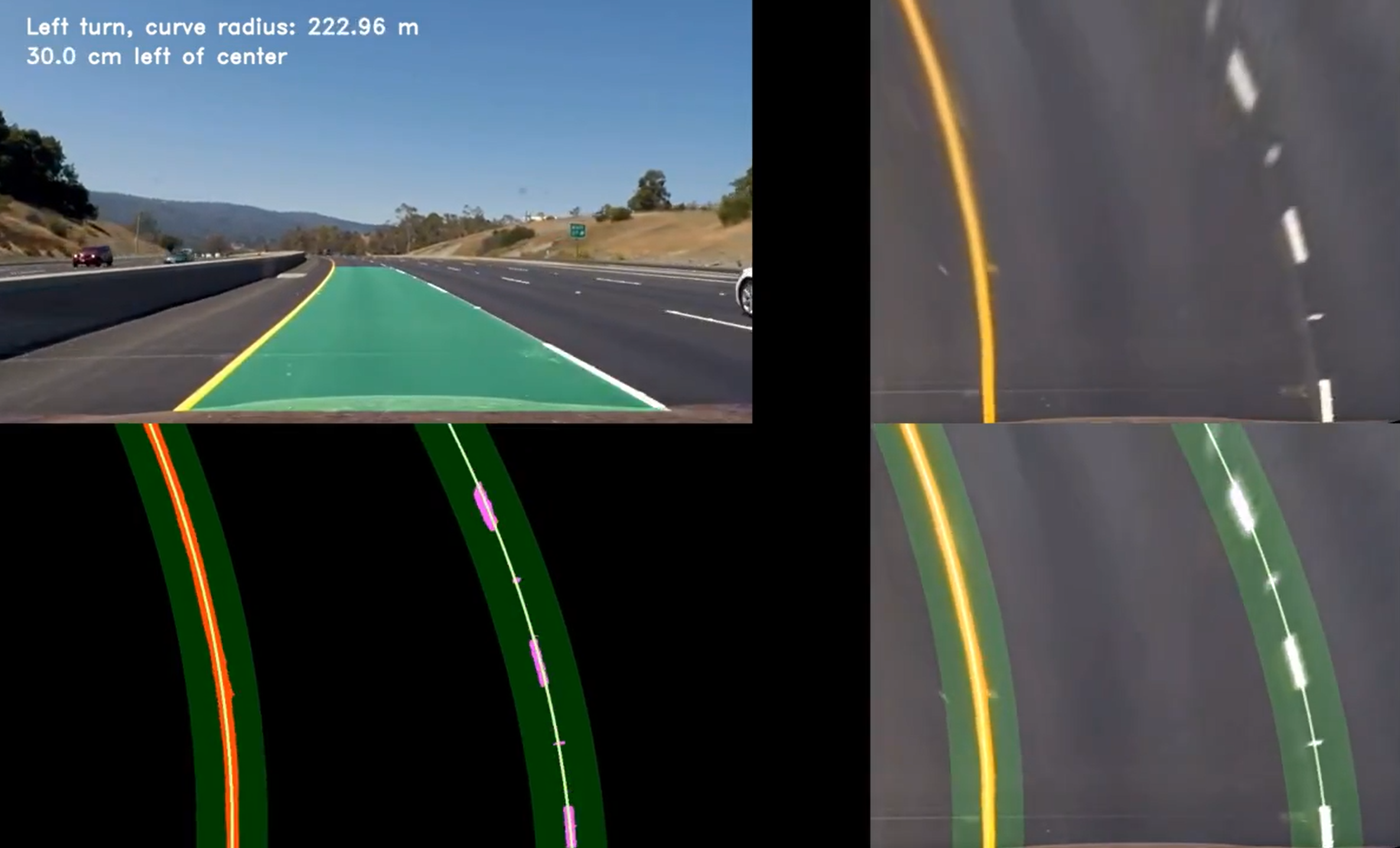
실제 이미지에 적용한 Vanishing point로 lane을 검출하여 lane의 접점을 red dot으로 표시하였다.
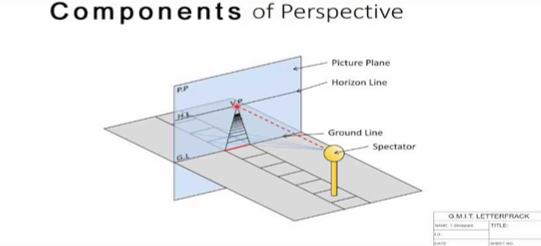
Perspective Transform
관심영역과 평행이 아닐 때 수집한 영상을 대상체와 평행인 것 처럼 보정처리하는 방법이다. 4개의 POINT를 설정하여 해당영역의 비율을 조정하여 이미지의 좌표를 변환처리할 수 있다.
 | 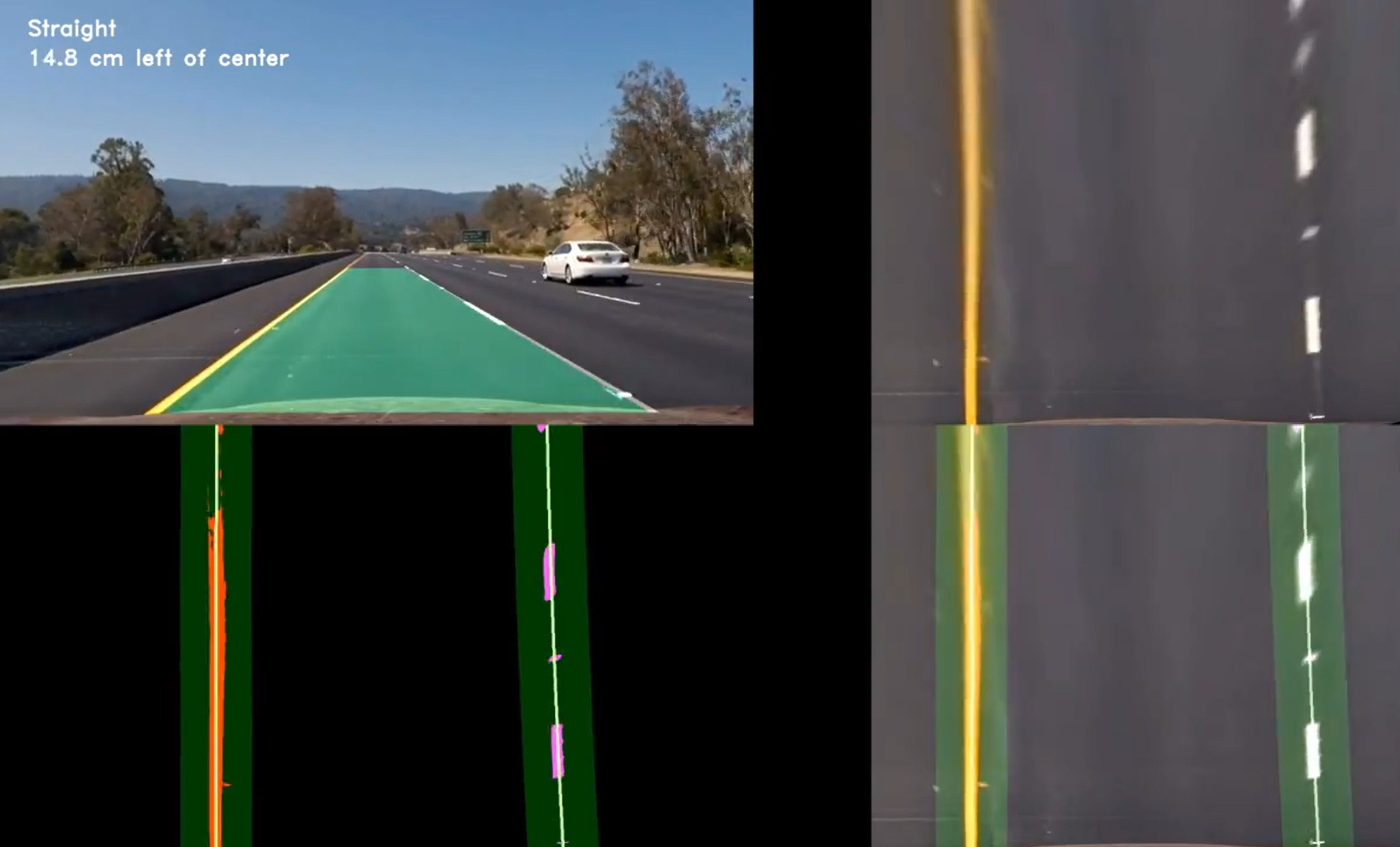 |
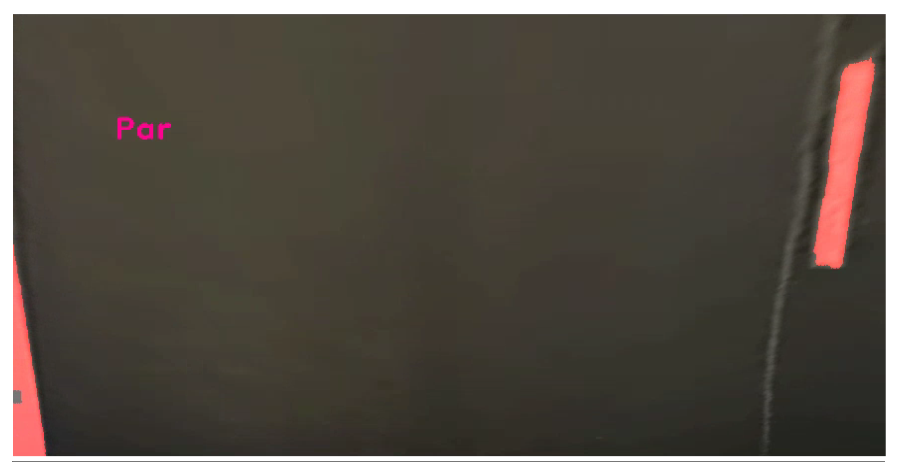
Perspective Transform을 임의의 영상에서 진행하면 다음과 같이 Fied of View를 변경하여 region of interest(ROI)를 lane으로 변경한 것이다.
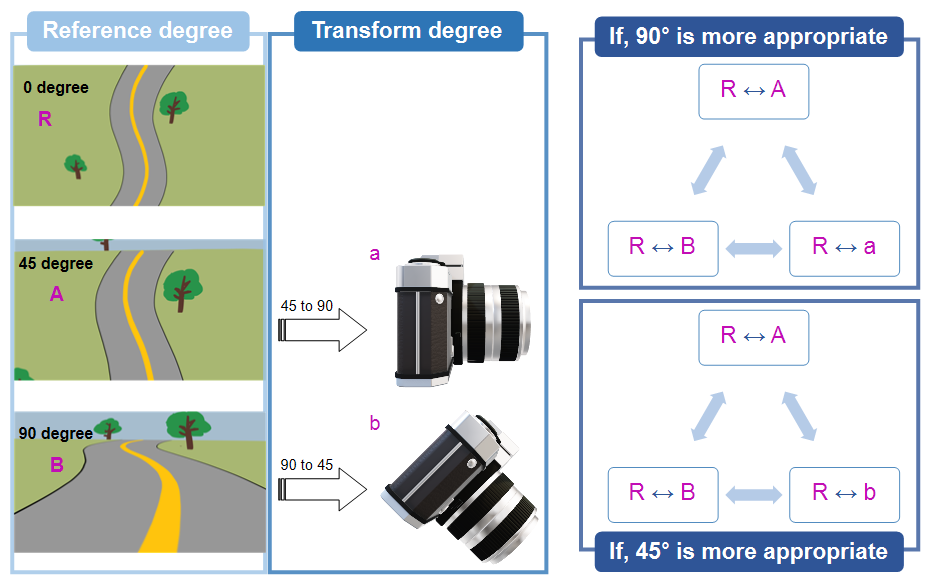
camera filed of view를 45 degree / 90 degree 로 진행하였을 때 어떤 방향이 더 효율적인가를 처음에 프로젝트 시작할때 고민하여 테스트를 진행
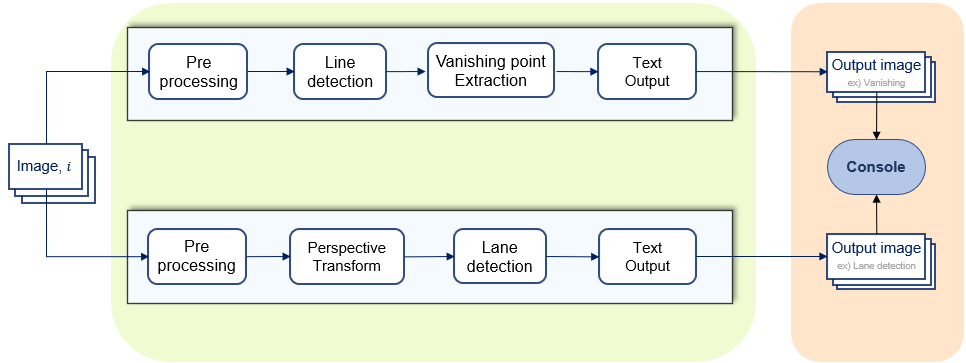
algorithm of project (flow chart)
결과
Vanshing Point
Box 크기를 조절하여 영상 내부에 소실점의 범위를 규정
Gaussian Distribution 공식 적용
bounding box의 타당성을 검증하기 위해 red dot 이 존재하는 영역의 좌표를 확인 후 Gaussian Distribution을 진행한 결과
Hough Transform Line Detection을 통해 Vanishing point 검출
(Hough Transform Line Detection 추가 설명)
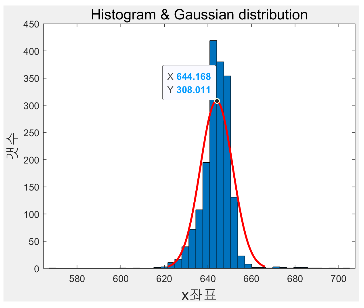 | 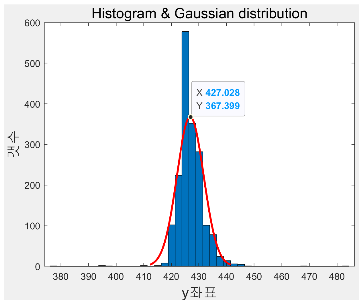 |
result of Gauissian Distribution for red dot.

Perspective Transform
변환 전 4개의 좌표를 직선 구간에서 선정
- 차량이 차선의 중앙이 아닐 경우 판단 가능. 범위를 벗어날 경우 Text 출력으로 현재 주행상태 시각화
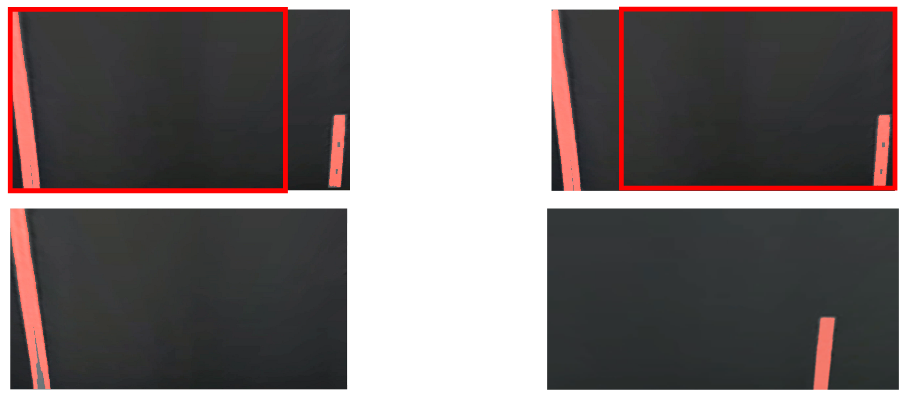
두 라인이 검출되면 parallel 하다고 판단한다.
Vanishing Point & Perspective Transform 결합
두 기법의 상호 보완 판단 지표
Confusion matrix 참고하여 발상
오류성 주행의 판단 지표
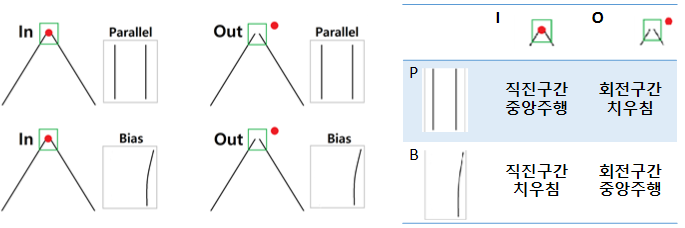
- 영상에서 각각 [In/Out], [Parallel/Bias] 출력
- Console에서 위 내용을 결합하여 [직진구간 중앙주행 / 직진구간 치우침, 회전구간 중앙주행 / 회전구간 치우침] 출력

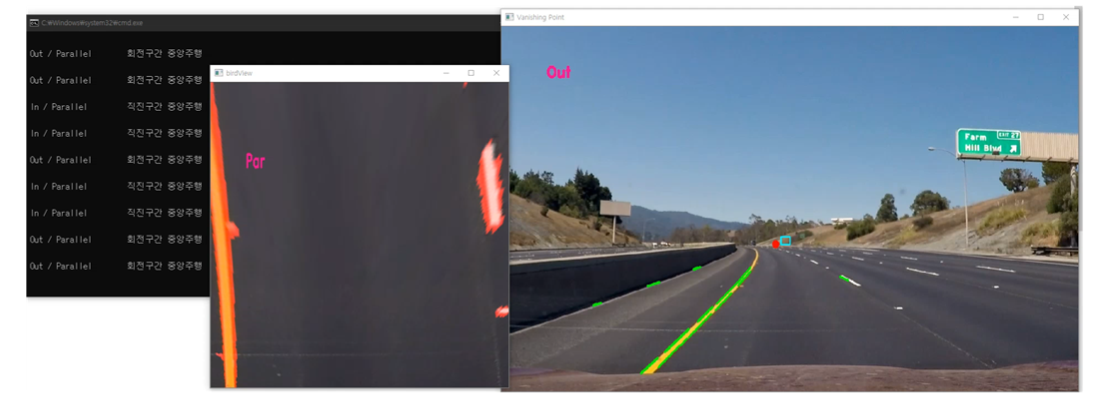
결론
- Bounding Box를 통해 Vanishing point의 직진/회전 구간을 판단.
- Perspective transform Lane detection을 적용하여 차량의 치우침을 판단.
- 위 두 조합의 상호보완을 통해 주행 안정성을 향상하는 기법을 제안.
- 오픈된 주행 영상 데이터셋을 이용하여 제안된 방법을 검증.
적용 가능성

참고 Refrence Paper